
Zymark Roboter XP
| Objektnummer | B00010598 |
|---|---|
| ID-Nummer | 010598 |
| Objektbezeichnung | Zymark Roboter XP |
| Status | Archiviertes Produkt |
Produktgruppe: Pipettiersysteme
Status, Liefer- und Zahlungsbedingungen
Geräteüberprüfung
Die gebrauchten Laborgräte werden vor der Auslieferung von der Labexchange Service GmbH überprüft. Sie erhalten voll funktionsfähige Geräte.
Versandzeit
Die angegebenen Versandzeiten sind die jeweils kürzesten für einen Artikel. Die tatsächlich Versandzeiten können im Einzelfall davon abweichen. Die endgültigen Versandzeiten werden in der Auftragsbestätigung angegeben.
Bei Bestellung/Anfrage von mehreren Artikeln bieten wir grundsätzlich Sammellieferung an. Die Versandzeit berechnet sich nach der Position mit der längsten Versandzeit. Auf ausdrücklichen Wunsch ist eine Teillieferung möglich.
Versandarten
Paketdienste, Speditionen, Selbstabholung, Lieferung durch Labexchange-Fuhrpark
Lieferinformationen
Unsere Lieferbedingungen sind grundsätzlich zzgl. Versandkosten. Angegebene Versandkosten sind zu erwarten. Falls anfallende Versandkosten nicht angegeben sind, fragen Sie diese bitte gesondert an.
Die angegebenen Fracht- und Verpackungskosten beziehen sich auf den günstigsten Transportweg und sind vorbehaltlich unvorhergesehener Kostensteigerungen. Durch unvorhersehbare Ereignisse können sich die Frachtraten und die Lieferzeiten jederzeit ändern und müssten der aktuellen Situation angepasst werden. Incoterm-Kodierung gemäß Incoterms 2010: Bei Selbstabholung EXW, bei Sendungen per Schiff CFR, per Luftfracht CPT, übrige Sendungen DAP. Hinweis für Auslandssendungen: Ein Präferenznachweis/EUR1 wird von uns nicht ausgestellt. Bei Selbstabholung/EXW aus Drittländern und der EU werden 16% MWSt als Kaution einbehalten bis wir die Gelangensbestätigung/den Verbringungsnachweis des Käufers erhalten haben.
Zahlungsbedingungen
Wir akzeptieren keine Zahlung per Letter of Credit, PayPal etc. Der Rechnungsbetrag ist in jedem Fall ohne Abzug fällig. Die Ware bleibt bis zur vollständigen Bezahlung unser Eigentum. Skonto wird nicht gewährt.
|
Land |
Mögliche Zahlungsarten |
Bemerkung |
|
DE, AT, CH |
Rechnung, Vorkasse, Kreditkarte |
Eine Zahlung per Rechnung ist nur für Firmenkunden möglich. |
|
NL, BE, LU |
Rechnung, Vorkasse, Kreditkarte |
Eine Zahlung per Rechnung ist nur für Firmenkunden möglich. |
|
Alle weiteren Länder |
Vorkasse, Kreditkarte |
|
Es gelten unsere Allgemeinen Verkaufs-, Lieferungs- und Zahlungsbedingungen. Diese finden Sie hier. Zwischenverkauf, sowie Irrtum und Preisänderungen sind vorbehalten.
Statusdefinition
Alle Artikel sind gebrauchte Artikel, es sei denn ein Artikel wird explizit als Neugerät aufgeführt.
|
Status |
Zustand |
Bemerkung |
|
Sofort verfügbar |
gebraucht |
Der Artikel wurde bereits überprüft und befindet sich in einem einwandfreien Zustand. Er kann direkt an Sie versendet werden. |
| Lagergerät |
gebraucht |
Der Artikel befindet sich in unserem Lager. Unsere Techniker werden den Artikel vor der Auslieferung überprüfen. Sie erhalten voll funktionsfähige Artikel. |
|
Anbieter |
gebraucht |
Der Artikel befindet sich noch beim Anbieter. Nach Ihrer Bestellung wird er von uns angekauft, überprüft und an Sie versendet. Ein Funktionszertifikat und ein Servicebericht sind bei der Lieferung enthalten. |
|
Neugerät |
neu |
Es handelt sich um einen fabrikneuen Artikel. Es gelten die Garantiebestimmungen des Herstellers sowie die gesetzliche Gewährleistungsfrist. |
|
Labprocure |
gebraucht |
Verantwortlich für den Inhalt dieses Geräteangebotes ist die Labprocure GmbH als Geräteinserent. Labprocure übernimmt die Haftung für die hier inserierten Angebote und für die beinhalteten Fotos und Angebotstexte. Labprocure GmbH, Bruckstrasse 58, 72393 Burladingen. |
Nachfolgende Abbildungen und Beschreibungen sind modellbezogen und aus Prospekten entnommen.
Sie geben nicht den Lieferumfang des Systems wieder.
Den exakten Lieferumfang entnehmen Sie bitte aus dem Angebotstext.
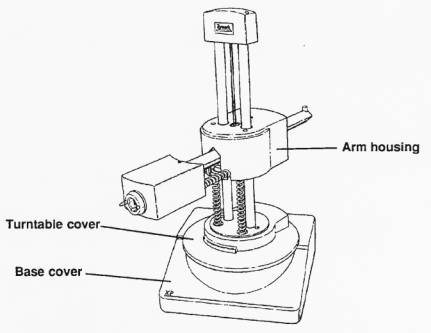
Zymark Syntheseroboter XP
Komponenten:
1. Arbeitstisch mit kompletter Umhausung
2. Zymark XP Roboterarm (Revision 4) mit Greifhand
Der XP Roboter ist auf einer runden Scheibe fest montiert. An der Scheibe befinden sich Langlöcher. Jedes zweite Langloch hat eine Nummer, mit der die Sektoren beschrieben werden.
An der Montageplatte können andere Module (PySection TM 's") eingebunden werden. Der XP Roboter verfügt über 3 Freiheitsgrade (Horizontal, Vertikal und in der Rotation). Ein vierter Freiheitsgrad ist die Drehbewegung der Wrist (eine aufgenommene Hand kann um 550° gedreht werden). Die Vertikale, Horizontale und die Rotations Bewegung werden über Seilzüge, die von Motoren bewegt werden, gesteuert. Die Seilbewegungen werden von einem Potentiometer abgegriffen und mit abgespeicherten Werten verglichen. Diese Werte befinden sich in einem batteriegepufferten RAM. Der Baustein ist auf der Hauptplatine Baseboard montiert. In allen drei Freiheitsgraden werden die Bewegungen zusätzlich über Encoder-Scheiben kontrolliert.
Generelle Spezifikation
Größe: Höhe: 70 cm über alles
Basis: 32 cm Durchmesser
Arm: 65 cm Länge
Freiheitsgrade:
Basis und Handgelenksbewegung: 4
Achsenpositionierung: Servo Motoren/Feedback Kontrolle über AccuTrack
Hebekraft: 1,4 kg
Hände: automatisch wechselbar
Umgebungsspezifikation
Stromversorgung: Wechselstrom, 220 V bis 240 V ± 10%
Frequenz: 48 - 62 Hz
Stromverbrauch: max. 180 VA
Temperatur, Betriebsbereich:+ 10° C bis + 30° C
Relative Luftfeuchtigkeit: 10 - 90 %
Sicherheit: kein Betrieb bei explosiver Konzentration
Korrosivität: der Standardroboter ist nicht für den Einsatz mit korrosiven Materialien ausgelegt.
Befestigung: aufrecht, auf einer flachen, horizontalen Oberfläche
Technische Spezifikationen
Wiederholbarkeit Drehbewegung 27 " maximal ± 0.5 mm
(gleiche Richtung): Radius
Vertikal maximal ± 0.25 mm
Ausfahrbewegung maximal ± 0.25 mm
Drehbewegung im maximal ± 0.5 mm
Handgelenk
Wiederholbarkeit Drehbewegung 27 " maximal ± 2.0 mm
(entgegengesetzte Richtung) Radius Überlappung
Vertikal maximal ± 0.5 mm
Ausfahrbewegung maximal ± 0.5 mm
Drehbewegung im maximal ± 1.0 mm
Handgelenk 6 inch
Radius
Inbetriebnahmefehler d.Dreh-0° 0.5 mm
achse von 27 " Radius 360° 0° mit AccuTrack
Temperaturfehler der Dreh- 0° 0.5 mm
achse bei 27 " Radius 360° 0.1 mm/° C (typischer Wert)
Die General Purpose Hand (GP Hand) verleiht dem Roboter die Fähigkeit, Gefäße und andere Objekte zu greifen. Jede Hand beinhaltet ein angepaßtes Fingerset, um eine möglichst große Bandbreite von runden Gefäßen handhaben zu können.
Die kleinsten Finger sind mit einem kleinen Draht auf der Grifffläche versehen, der ein sicheres Handling von kleinen Gefäßen, wie Autosampler Vials, sicherstellt.
3. Zymark Steuercomputer System V Controller
Der System V® Controller ist ein eigenständiger Rechner, der für die Datenverarbeitung des Roboter Systems verantwortlich ist. Mit Hilfe eines handelsüblichen PC's, der als Eingabegerät dient, ist der Controller über eine serielle Schnittstelle verbunden. Mit einem System V® Controller können bis zu 15 verschiedene Geräte gesteuert werden, wie z. B. der Roboter, ein Vortexer, etc. Die angesteuerten Geräte besitzen Modulkarten. Bei Zymark® Geräten wird eine spezielle Software mitgeliefert, die die Einbindung dieser Geräte in ein System sehr einfach ermöglicht. Auf den einzelnen Karten befinden sich Eproms, in dem die Bedieneroberfläche abgelegt ist. Diese kann über das System V® Terminal aufgerufen werden.
4. Handkontroller Q-term J10
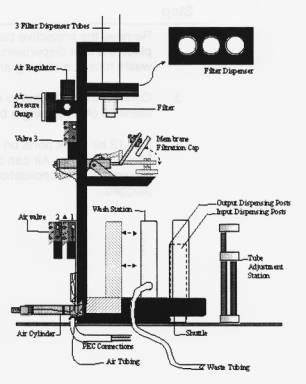
5. Membran-Filtrations-Station
(auotmatische Übersetzung)
Die Membranfiltration PySection trennt die Bestandteile aus einer flüssigen Probe, indem sie die Probe durch ein 0.45 Mikron Gelman Membranfilter filtert.
Diese Filter werden in drei Zufuhren gestapelt, die diese Workstation zur Verfügung stellt.
Der Roboter entnimmt einen Filter von der Zufuhr und stellt ihn auf den Filterhalter unter der Membranfiltrationskappe. Der Roboter kann entweder die Probe in den Filter pipettieren oder gießen, der dann durch die Kappe umfaßt und versiegelt wird. Abhängig von der Konzentration, können bis 10 ml der Probe durch jeden Filter geführt werden.
6. Liquid/Liquid Extraction Station mit Phasengrenzenerkennug
Die Liquid / Liquid PySectionTM wird eingesetzt, um eine gewünschte Phase bei einer Flüssig-Flüssig Extraktion zu trennen. Die Liquid / Liquid wird in ein System eingebaut und kann mit verschiedenen Reagenzgläsern bedient werden. Die Liquid / Liquid besteht aus einem Metallständer, an der unteren Seite ist ein Schuttle angebracht, auf diesem ist ein 10ml Reinigungsbehälter aus Teflon® befestigt. Der Reinigungsbehälter wird verwendet, um die Dossiernadel, die auf der oberen Seite angebracht ist, zu säubern. Bei einem solchen Waschvorgang wird die Nadel innen und außen gesäubert. Diese Spülung wird zwischen den verschiedenen Extraktionen angewendet. Das Shuttle wird über einen Pneumatik Zylinder bewegt. An dem Zylinder befindet sich ein Ventil, welches über den Power und Event Controller angesteuert wird. Auf die gleiche Art wird die Nadel bewegt.
Die Liquid / Liquid PySectionTM wird wie alle Zymark® Standard Komponenten mit der EasyLab® Software geliefert. Die Software enthält verschiede Routinen und Variablen, die schon vorprogrammiert sind. Es besteht die Möglichkeit, die gewünschte Phase der oberen oder unteren Schicht aus dem Reagenzglas zu isolieren. Es lassen sich die Geschwindigkeiten für das Füllen sowie das Entziehen von Flüssigkeiten einstellen und das Säubern der Nadel.
Die entnommene Phase kann entweder verworfen, oder in ein anderes Probengefäß übertragen werden. In beiden Fällen wird die zu entnehmende Phase durch eine Kanüle angesaugt und innerhalb einer 10 ml großen Teflonschleife zwischengelagert (Spritzen
der MLS).
Spezifikationen
Reinigungsbehälter besteht aus Teflon®, rostfreier Stahl (316), inerte Polymere Probenkontakt.
Länge der Probengefäße: maximal 15 cm (verschließbare 16 mm x 100 mm Reagenzgläser und 15 ml Zentrifugenbecher werden nicht empfohlen).
Empfohlener Durchmesser der Probengefäße: Minimum 16 mm
zusätzlich notwendige PySektionen:
Master Labor Station (10 ml Spritze)
Power & Event Controller (2 Schalter (Switche), 2 Eingänge (Input))
Hand für Probengefäße
Luftdruck: saubere trockene Luft, 30psi (205 kPa)
Maße: 2 PySektionen
Breite x Höhe x Tiefe: 6,5 cm x 64 cm x 31 cm
Gewicht: 11 kg
7. Dilute & Dissolve Station mit Vortexter und 9 Kanal Lösungsmittel und
Flüssigreagenzienzugabe
Die Dilute & Dissolve - Station wurde entwickelt, um drei verschiedene Lösungsmittel quantitativ zu forcieren und Proben ggf. auf einem Vortex Mischer aufzulösen. Diese Dosier- und Mischfunktionen können zusammen oder isoliert verwendet werden. Die Station untergliedert sich grundsätzlich in zwei Teile, welche auf einer gemeinsamen Montage-platte (PySection") befestigt sind
1. Vortex Mischer
Der Vortex Mischer besteht aus einem Gleichstrommotor, welcher geschwindigkeits- und laufzeitgesteuert über einen Excenter ein Gefäß in Taumelbewegung versetzt. Das Gefäß wird in einer Führungseinheit oberhalb des Vortexers grob fixiert und sitzt auf dem Excenter in einer Kunststofführung. Es besteht weiterhin die Möglichkeit, zwei Kunststofführungen auf der Montageplatte zu installieren, welche als Parkstation für Gefäße bei einem zeitgesteuerten Ablauf dienen.
2. Dosiereinheit
Die Dosiereinheit besteht aus einer fixierten Dispensier Position, die drei verschiedenen Reagenzienzuleitungen von einer MasterLabStation TM (MLS") aufnimmt und einem Abfallschlauch, welcher über einen aufgesetzten Trichter Flüssigkeiten einer Abfallflasche zuführt.
Zu dieser Station gehört eine steckbare Modulkarte, welche die Kommunikation zwischen dem Controller (,System V®) und der Station herstellt.
8. Capper/Decapper Station
Die Z 410 Capping Station ist ein Gerät, das es ermöglicht, eingestellte Gefäße mit Schraubverschlüssen, zu greifen und anschließend einer links- oder rechtsgerichteten Drehbewegung auszusetzen. Dadurch ist man in der Lage, Gefäße automatisch zu öffnen bzw. zu verschließen.
Schraubverschlüsse werden mittels einer Roboterhand (Robot-Assisted Capping) oder eines pneumatischen Greifers (Fully-Automated Capping) auf die Gefäße aufgesetzt bzw. entnommen. Entnommene Schraubverschlüsse können auf einer zugehörigen Parkstation abgelegt werden.
Die Dreh- und Greifeinheit ist in einem runden Metallgehäuse auf einer Grundplatte montiert und beinhaltet zwei Gleichstrom-Elektromotoren. Einer der Motoren ist an einer dreh-bar gelagerten Platte angeflanscht und kann die darauf angebrachten Gefäßgreifer mittels eines Zahnstangengetriebes in linearer Bewegung öffnen und schließen. Diese Bewegung wird über einen optischen Sensor positioniert.
Der zweite Motor kann diese Anordnung in links- oder rechtsgerichtete Drehbewegung versetzen.
9.1 1xHeater/Cooler HP-Block Variomag 12.2 mit Inertgas Cover
9.2 3xHeater/Cooler HP-Block Variomag 12.2 mit Reflux-Kühler Aufsatz
Das H+P Reaktionsblock-System besteht aus folgenden Baugruppen:
Reaktionsblock mit
Magnetrührer,
elektrischer Heizung,
Kupferrohrschlange(n) zum Kühlen und/oder Heizen
Steuergerät TELEMODUL 40 ST.
Der Reaktionsblock kann mit einem Kaltwasseranschluß verbunden oder zusammen mit einem einfachen Umlaufkühler oder Kryostaten eines gängigen Herstellers betrieben werden.
Der Reaktionsblock ist erweiterbar durch einen
Rückflußkühler und einen
Inertgasaufsatz.
Das Reaktionsblock-System ist in den drei standardisierten Rahmengrößen lieferbar. Innerhalb dieser Standardformate variiert die Anzahl der Rührstellen sowie der Blockbohrungsdurchmesser.
Gefäße für den Reaktionsblock:
Reaktionsgefäß: Reagenzglas
Nenninhalt: 40 ml
Blockbohrungen Ø 12 (25,5 mm)
|
Technische Daten |
|
Reaktionsblock |
|
|
|
Rahmen 1 |
Rahmen 2 |
Rahmen 3 |
|
Rührleistung |
40 Watt |
||
|
Drehzahlbereich |
100 (+30) bis 2000 (-50) 1/min |
||
|
Drehzahländerung bei Lastwechsel |
keine |
||
|
Heizleistung |
1000 W |
530 W |
270 W |
|
Betriebstemperatur |
-80 °C bis +200 °C |
||
|
Übertemperaturschutz |
thermisch irreversibel |
||
|
Werkstoff des Blocks |
Aluminiumlegierung, AlMgSi1 |
||
|
Werkstoff des Rahmens |
Stahl, lackiert |
||
|
Gewicht (Reaktionsblock) |
ca. 25 kg |
ca. 20 kg |
ca. 20 kg |
|
Zul. Umgebungstemperatur |
-10° bis +56 °C bei max. 80 % Luftfeuchtigkeit |
||
|
Schutzart nach DIN 40050 |
IP 31 |
||
|
Anschlüsse für Thermostate |
2 Gewinde M 16x1 |
||
|
Zubehör |
Rückflußkühler, Silikonabdeckmatte, Inertgasaufsatz, Distanzrahmen, Reduzierhülsen, Stativstab |
||
10. 4x Variomag Steuergerät Telemodul 40CT
Das TELEMODUL 40 CT arbeitet mit einer Menüsteuerung. Die Anzeige zeigt die eingestellte Drehzahl (rpm), die aktuelle Blocktemperatur und gibt einen Überblick über die eingestellten Funktionen und deren Parameter.
Sie können die Einstellparameter des Rührers, der Heizung und der Schaltuhr ändern. Das Einstellrad dient dabei gleichzeitig zum Auswählen der Menüs und zum Einstellen der Werte.
|
Typ |
Steuergerät TELEMODUL 40 CT |
|
|
|
mit 15poliger Rechteckanschlußdose |
mit getrennten Steuerungs‑ und Heizungsanschlüssen |
|
Rührleistung |
100 % - 30 % der Nennleistung |
|
|
Nennleistung |
40 W |
|
|
Heizleistung |
bis 1100 W |
bis 2000 W |
|
Drehzahlbereich |
100 (+30) bis 2000 (-50) 1/min |
|
|
Drehzahlkonstanz |
± 3 % |
|
|
Regeltemperaturbereich |
10 °C über Umgebungstemperatur bis +200 °C |
|
|
Maße (BxTxH) in mm |
255 x 180 x 90 |
|
|
Gewicht |
2,0 kg |
|
|
Zul. Umgebungstemperatur |
0 bis +40 °C bei max. 80 % Luftfeuchtigkeit |
|
|
Betriebsspannung |
230 VAC / 50 - 60 Hz |
100 - 240 VAC / 50 - 60 Hz |
|
Ausgangsspannungen |
2 x 36 Veff. / 100-240 VAC (~) |
|
|
Sicherung |
M 6,3 A |
intern |
|
Schutzart nach DIN 40050 |
IP 20, Schutzklasse 1 |
|
|
Ausbaustufen und Zubehör |
Medientemperaturfühler, Adapter für Reaktionsblock neuen Typs (mit getrennten Steuerungs- und für Heizungsanschlüssen) |
Medientemperaturfühler |
Das Steuergerät Telemodul 40 CT kann mit allen VARIOMAG Reatkionsblöcken sowie mit Rühr-Blockthermostaten und Multitherm ab Baujahr 8/99 kombiniert werden. Achten Sie darauf, die richtige Anschlußvariante zu wählen.
11. 3xSpritzenpumpe mit 3xje 10 ml Dilutoren
12. 1xSpritzenpume mit 2x je 10 ml Dilutoren + 1x1ml Dilutor
13. 1xZugabenadel für den Roboterarm an 1 ml Dilutor angeschlossen mit
Schutzgasanschluß zum Spülen der Nadel
14. Zugabenadel für den Roboterarm an 10 ml Dilutor angeschlossen mit
Argonanschluß zum Spülen der Nadel
15. Druckminderer
16. Schnittstelle für Waage
17. Software zur Steuerung und Programmierung (unter Windows lauffähig)
Fragen?
Ihr Labexchange-Team hilft gerne weiter:

Christian Schmid
Labor und Analytik, Laboreinrichtung, Life Science

Hubert Sauter
Spektroskopie, Chromatographie



